


三维扫描激光测振系统:复杂曲面XYZ三向模态测试方案
典型型号: VSM4000LL50m-EXT-SCAN-3D 三维扫描配置
最大速度: ±40 m/s
振动位移范围: ±10 mm
速度解码器带宽: DC-3 MHz
工作距离: 0.1-50 m;三维近距离配置需按现场确认
位移分辨率: 约 15 pm
速度分辨率: 约 0.08 µm/s
扫描角度: 50° × 50°,角度分辨率 0.001°
最大扫描速率: 约 30 点/秒
三维轮廓: 0.25-50 m 范围内可进行复杂曲面形貌扫描,精度约 ±2.5 mm
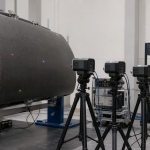
当被测结构不是平面,或者需要把 X、Y、Z 三个方向的响应合成判断时,三维扫描激光测振系统比二维扫描更适合。它通过多套扫描头和三维对中,把复杂结构的表面形貌、测点坐标和振动响应放在同一套数据里处理。
工作距离0.1-50 m 配置可选
三向响应X/Y/Z 位移、速度、加速度
最大测点1024 × 1024
形貌扫描复杂曲面自动建模
产品基本参数
| 参数 | 内容 |
|---|---|
| 典型型号 | VSM4000LL50m-EXT-SCAN-3D 三维扫描配置 |
| 最大速度 | ±40 m/s |
| 振动位移范围 | ±10 mm |
| 速度解码器带宽 | DC-3 MHz |
| 工作距离 | 0.1-50 m;三维近距离配置需按现场确认 |
| 位移分辨率 | 约 15 pm |
| 速度分辨率 | 约 0.08 µm/s |
| 扫描角度 | 50° × 50°,角度分辨率 0.001° |
| 最大扫描速率 | 约 30 点/秒 |
| 三维轮廓 | 0.25-50 m 范围内可进行复杂曲面形貌扫描,精度约 ±2.5 mm |
三维系统解决的是方向问题
二维扫描通常测量目标表面法向响应。对于翼面、壳体、叶片、曲面天线、复合材料件等结构,单一方向可能无法说明实际动力学状态。三维扫描系统通过多个扫描头对同一测点进行对中测量,得到三个正交方向和合成方向的结果。


适合哪些对象
- 飞机机翼前缘、后缘、翼端等连续曲率曲面。
- 航空发动机、船舶部件、旋转机械和大型复合材料结构。
- 汽车车身、制动部件、挡风玻璃等需要整体模态判断的结构。
- 需要形貌扫描、三维测点坐标和振动响应一起输出的研发测试。
系统能力不只是三台光学头
| 模块 | 需要确认的能力 |
|---|---|
| 主/辅激光扫描头 | 激光波长、功率、自动聚焦、扫描角度、角度分辨率 |
| 三维对中与轮廓扫描 | 三束激光是否能快速对中,是否支持复杂曲面自动建模 |
| 数据采集前端 | 输入通道、采样率、分析带宽、信号源输出和触发方式 |
| 控制与分析软件 | 扫描控制、FRF、ODS、EMA/OMA/MIMO 模态分析和动画输出 |
| 机械支撑与现场空间 | 三脚架、推车、电缆、测试面积和光路安全 |
咨询前建议准备的资料
三维扫描方案的配置差异较大。建议先提供被测件三维模型或照片、尺寸范围、目标频率、激励方式、测量距离、是否高温、是否需要与力锤/激振器/加速度计同步,以及最终报告需要的曲线、云图或动画格式。
边界说明
三维扫描适合稳态或可重复激励的高密度全场测试。如果目标是一次性瞬态事件,需评估多点同步系统或高速采集方案,而不是直接默认三维扫描。
获取选型建议
如需进一步选型,可通过 www.wmkjqd.com 联系无觅科技。建议同步提供被测对象、测量目标、工作距离、频率范围、测点数量、现场照片或结构图纸,我们可以据此判断适合单点、多点、二维扫描、三维扫描还是激光位移传感器方案。
- 产品咨询:确认单点、多点、二维扫描或三维扫描配置。
- 应用咨询:确认激励方式、数据采集、模态分析与结果呈现。
- 资料建议:提供样件照片、结构尺寸、测试目标和现场限制条件。